Nyelvváltás :
Tovább az igus Robot Control szoftverhez
Robotok licenc mentes programozása, szimulálása
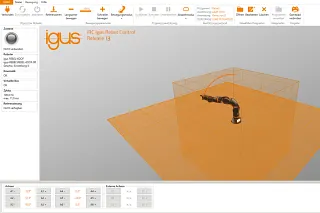
Az igus Robot Control egyszerű és intuitív robotprogramozást és vezérlést tesz lehetővé, ezzel megkönnyíti az automatizálás kezdeti lépéseit. A moduláris kivitelnek köszönhetően számos robot kinematikát lehet vezérelni, például delta robotokat, lineáris robotokat vagy többtengelyes robotkarokat. A szoftverrel a felhasználók a 3D felületen szimulálhatják a robot egyedi mozgásait – a robotot ehhez a lépéshez nem kell csatlakoztatni.
Az oldalon szereplő témák
Ingyenes robot szoftver
Programozási példák különböző alkalmazásokra a robotszoftverrel
- Egyszerű kapcsolat a robot és a vezérlőrendszer között
- Az intuitív működés 3D felülettel és digitális iker technológiával lehetővé teszi a mozgássorozatok közvetlen végrehajtását és ellenőrzését
- A kamera interfész konfigurálása közvetlenül a vezérlőrendszeren és a szoftveren keresztül lehetséges
- Delta-, lineáris, SCARA robotok és robotkarok programozása
- A szoftver kockázatmentes tesztelést tesz lehetővé a vásárlás előtt
Rendszerkövetelmények:
- PC Windows 10 operációs rendszerrel
- Kommunikáció Etherneten vagy WLAN-on keresztül
- 500 MB szabad tárhely
Mintaprogramok, wiki és tanfolyamok



Interfészek
PLC interfészek
A PLC-interfész (PLC = programozható logikai vezérlő) lehetővé teszi az alapfunkciók végrehajtását és az állapotok jelzését digitális bemenetek és kimenetek segítségével. A PLC-n keresztül történő vezérlés mellett ez az interfész lehetővé teszi a hardver gombokon keresztül történő működtetést is.
Digitális bemenetek és kimenetek
A robotprogramok betölthetők és elindíthatók, a megfogó parancsok pedig digitális bemeneteken vagy globális jeleken keresztül küldhetők. Ez például akkor hasznos, ha egy adott programból gombok vagy a CRI-GSig utasítás segítségével kell kiválasztani egy programot.
Modbus TCP/IP
A Modbus TCP interfész használható például PLC-adatok és utasítások küldésére a robotvezérlő rendszer felé, valamint állapotinformációk fogadására.
CRI interfész
A CRI interfész lehetővé teszi összetett utasítások küldését, valamint információk és beállítások lekérdezését az Ethernet interfészen keresztül TCP/IP protokoll segítségével. Az iRC ezt az interfészt használja robotokkal, amelyek integrált vezérlőrendszerrel rendelkeznek, vagy más iRC-kompatibilis rendszerekkel való kapcsolódásra..
Kamera interfész
A kamera interfész lehetővé teszi a tárgyfelismerő és videokamerák használatát. A tárgyfelismerő kamerák felismerik a tárgyak helyzetét és osztályát, és ezeket - opcionálisan videoképpel együtt - továbbítják a vezérlőrendszerbe. A vezérlőrendszer a kamera objektumpozícióiból kiszámítja a robot koordinátarendszerében a pozíciókat. A tisztán videokamerák csak képet szolgáltatnak, ezért csak a munkaterület megfigyelésére használhatók, de objektumfelismerésre nem.
Felhő
A felhő interfész lehetővé teszi a robot felügyeletét a RobotDimension segítségével. Aktiválás és bejelentkezés után a robot alapvető állapotinformációkat és kameraképeket küld az online szolgáltatásnak. A felhasználó listázhatja robotjait a weboldalon, és lekérdezheti az információkat.
ROS, Matlab, LabView és még sok más.
Integrálja a robotokat az ROS környezetébe. Dokumentáció és csomagok a hardveres kommunikációhoz, Teleophoz és moveIt-hez
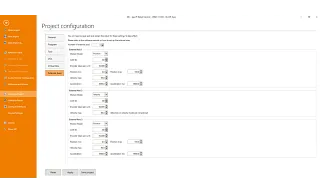
Projekt konfigurációk
Megfogó
Itt adható meg az összeszerelt szerszám. A szerszám megváltoztatásához a projekt újratöltése vagy az integrált vezérlőrendszer újraindítása szükséges. Az új szerszámokat konfigurációs fájlként lehet definiálni a „Data/Tools” menüben
Virtuális doboz
A robotkar mozgástartományát a virtuális doboz beállításai korlátozzák. Ez a funkció segít megelőzni a mechanikai sérüléseket, és az alkalmazástól függően egyszerűsíti a programozást. Ha olyan program végrehajtása történik, amely sérti a virtuális dobozt, a program hibaüzenettel megszakad.
Külső tengely
A robotvezérlő rendszer legfeljebb 3 további tengelyt támogat (az iRC-ben „külső tengelynek” is nevezik). Ezeket a robottengelyeknek megfelelően lehet telepíteni és az iRC konfigurációs területén keresztül konfigurálni.

Program
Itt lehet definiálni a robotot és a logikai programot, a mozgás sebességét (a maximális sebesség százalékában), a visszajátszási módot és a programhibákra való reagálást.
Egyedi kinematika
A robotvezérlő rendszer az Ön robotjára szabható digitális ikerpárral. Az inverz kinematikát úgy konfiguráljuk, hogy megfeleljen az Ön projektjének.
Programozás
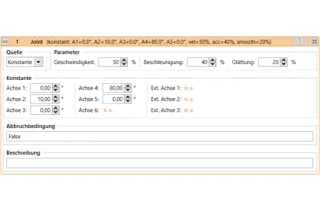
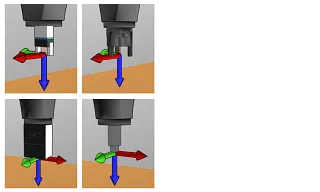
Tengelymozgások
A Joint parancs a robotot egy abszolút célpozícióba mozgatja, amelyet tengely koordinátákban adunk meg (pl. tengelyszög vagy egy lineáris tengely pozíciója). A TCP eredő mozgása általában egy görbe és nem egy egyenes vonal.
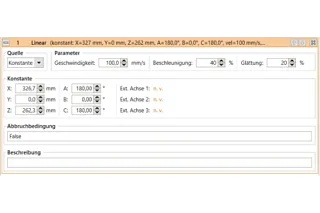
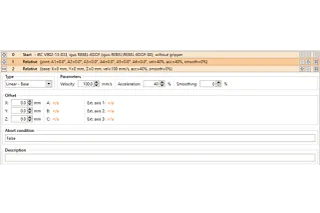
Lineáris mozgás
A Linear parancs a robotot egy abszolút, karteziánus koordinátákban megadott célpozícióba mozgatja. A TCP ebből eredő mozgása egyenes vonal mentén történik.
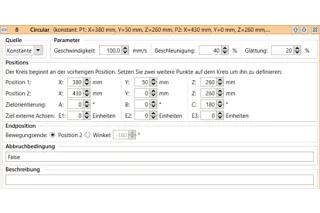
Körkörös mozgások
A „Circular movement” utasítás teljes vagy részleges körpályán történő mozgást tesz lehetővé. Ez az utasítás kompatibilis a lineáris mozgásokkal, így a lineáris mozgásokból és a lineáris mozgásokból való átmenet simítható.
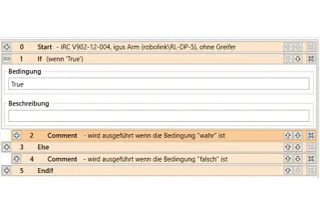
Feltételek
A feltételek használhatók if-then-else parancsokban, ciklusokban és a mozgásparancsok törlési feltételeiként. A feltételek lehetnek digitális bemenetek, globális jelek, Boole-műveletek és összehasonlítások kombinációi.
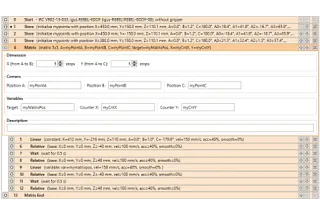
Mátrix számítás
A rács utasítások egy rácshoz igazított pozíciókat számolnak ki, pl. raklapozási feladatoknál komissiózási vagy lerakási pozícióként.
Relatív
A Relative parancs lehetővé teszi a robot mozgatását az aktuális pozíciójához képest. Elérhető az „Action” → „Relative movement” menüpontokon keresztül.

Alprogramok
Az alprogramok a „Sub” paranccsal hívhatók elő. Az alprogram fájljának elérési útvonalát a „File name” alatt kell megadni. Ez az iRC „Data” mappa „Programs” almappájához tartozik.
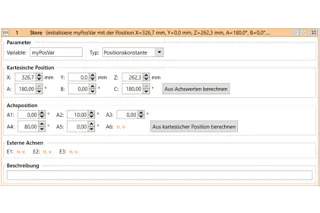
Változók és változóhoz való hozzáférés
Az iRC és a TinyCtrl programjai kétféle változót támogatnak:
- Numerikus változók: Ezek egész vagy tizedespontos számok tárolására használhatók.
- Pozíció változók: Ezek karteziánus pozíciók és szögpozíciók tárolására használhatók. A kontextustól függ, hogy egy ilyen változót karteziánus pozícióként vagy szögpozícióként értelmezünk.
Robot szoftver letöltése

A licencmentes igus Robot Control szoftver a vezérlőrendszerbe van integrálva, így a rendszer számos komponenséhez standard működési koncepciót és egységes kommunikációs szolgáltatásokat használ. Ez csökkenti a projekttervezési ráfordításokat és megkönnyíti az üzembe helyezést.
- Tesztelje előre az összes igus® kinematikát a szoftverben
- Előre programozott projektekkel minden igus robothoz, egyes tengelyhez és AGV-hez
- Intuitív 3D-s felület a robot szimulációjával
Konzultáció
Alig várom, hogy válaszoljak a kérdéseire
igus® GmbH+49 2203 9649-0E-mail írása
Shipping and consultation
In person:
Monday to Friday from 7 am - 8 pm.
Saturdays from 8 am- 12 pm.
Chat-Service
Monday to Thursday from 8 am - 6 pm.
WhatsApp-Service:
Monday to Thursday from 8 am - 4 pm.